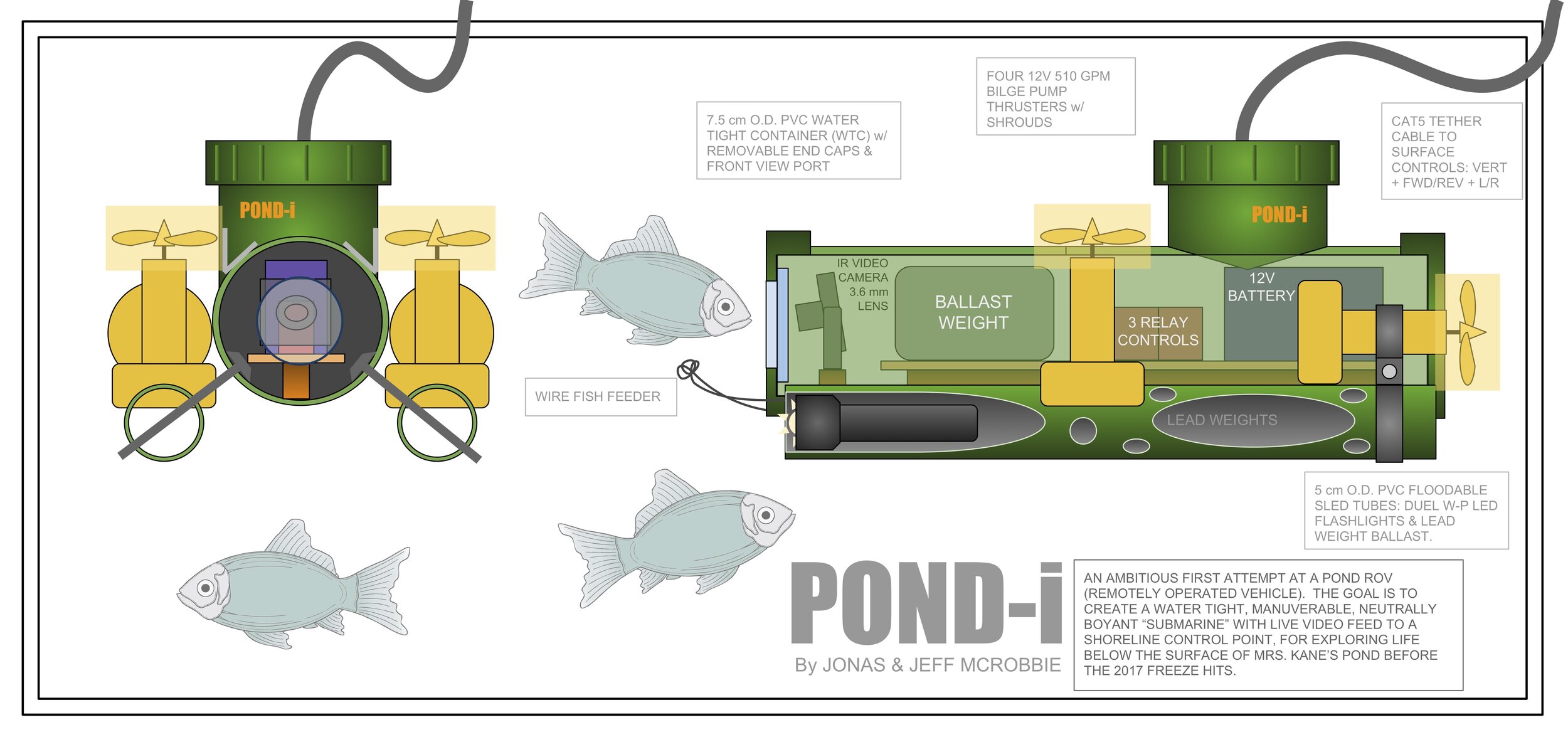
POND-i Remotely Operated Vehicle
Between 2017-19 Jonas and I designed and built a ROV (Remotely Operated Vehicle) with the goal of 1) making a small working tethered submarine with live video feed and 2) exploring the depths of a Pennsylvania pond in Grandmom’s neighborhood and 3) learning everything we could about all aspects of such things! Wonderfully, this project connected us with experts in materials & electronics, as well as an army of ROV builders out there, and with each other! Well worth it …
Featured